


LGAI-BCD01型 AI機器人底盤開發平臺
一、LGAI-BCD01型 AI機器人底盤開發平臺產品簡介:
LGAI-BCD01型 AI機器人底盤開發平臺是一款基于ROS平臺的工業級移動底盤方案;適用于機電相關、計算機專業、人工智能等學科,進行傳感器、機器人學、ROS系統、人工智能、工業級ROS平臺的機器人地盤、機械臂,教學、研究及應用的工業級模塊化機器人組件;可作為人工智能、軟件工程、現代物流、工業AGV、醫療、服務等新工科專業的實訓平臺。

 二、AI機器人底盤開發平臺產品特點:
二、AI機器人底盤開發平臺產品特點:
1.驅動方式:多輪驅動
行走方式:全向移動
2.全向移動底盤:可支持循跡、避障、路徑規劃、激光雷達掃描,地圖自構建、視覺追蹤、遠程遙控視頻傳輸
3.移動抓取方案:移動底盤與機械臂完美搭配,可實現機器人移動抓取。
4. 控制系統:采用工控系統,預裝ros操作系統,例程完整
5.教學支持:
(1)ros系統教學,工業機械臂教學,工業底盤教學。
(2)具備移動導航、目標識別與操作的服務機器人系統
(3)能夠進行目標分類揀選的物流機器人系統
(4)具備干預操作的移動醫療機器人系統
(5)基于機器學習人工智能機器人系統
三、產品構成:
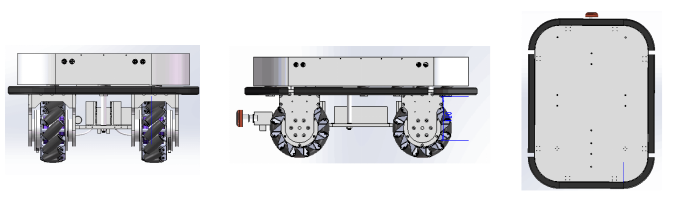
1.模塊化的機器人控制開發平臺:全向移動底盤
2.主機平臺:PC級工控主板、8路無刷電機驅動器、大容量鋰電池、激光雷達接口、輪接口、二維碼慣性導航接口、雙目視覺接口以及機械臂接口;
3.麥克納姆輪組件:麥克納姆輪、無刷電機;
4.傳感器:激光雷達(標配)、攝像頭(標配)、雙目攝像頭(選配)。
四、性能系數:
1.移動底盤參數:
尺寸:700x500x300mm;自重:60kg;載重:100kg;續航:4小時;續航:約15km;車速:1m/s;*高轉向速度:100°/s;工作電壓:24V;電量:25Ah待機時間;充電時長:12小時;

2.主機性能參數:
Intel® Celeron™ N3150(1.6GHz)四核CPU;4G DDR3 1600MHz內存;120G硬盤;USB3.0 x2、USB2.0 x2、VGA顯示接口 x1、DVI-D顯示接口 x1、音頻接口 x3(輸入,輸出,麥克風)、COM接口 x2、RJ-45網絡接口 x2。

3.定位導航:二維碼慣性導航;

4.安全防護:機械防撞條、超聲測距、激光雷達;
五、課程設置:
六、軟件相關方案:
基于ROS操作系統、ROS系統使用基礎、ROS中機器人導航基礎內容(需要雷達)、ROS中操作機械臂基礎內容、ROS中視覺基礎內容(需要攝像頭/雙目攝像頭)、基于ROS的應用級機器人開發。
LGAI-BCD01型 AI機器人底盤開發平臺是一款基于ROS平臺的工業級移動底盤方案;適用于機電相關、計算機專業、人工智能等學科,進行傳感器、機器人學、ROS系統、人工智能、工業級ROS平臺的機器人地盤、機械臂,教學、研究及應用的工業級模塊化機器人組件;可作為人工智能、軟件工程、現代物流、工業AGV、醫療、服務等新工科專業的實訓平臺。
1.驅動方式:多輪驅動
行走方式:全向移動
2.全向移動底盤:可支持循跡、避障、路徑規劃、激光雷達掃描,地圖自構建、視覺追蹤、遠程遙控視頻傳輸
3.移動抓取方案:移動底盤與機械臂完美搭配,可實現機器人移動抓取。
4. 控制系統:采用工控系統,預裝ros操作系統,例程完整
5.教學支持:
(1)ros系統教學,工業機械臂教學,工業底盤教學。
(2)具備移動導航、目標識別與操作的服務機器人系統
(3)能夠進行目標分類揀選的物流機器人系統
(4)具備干預操作的移動醫療機器人系統
(5)基于機器學習人工智能機器人系統
三、產品構成:
1.模塊化的機器人控制開發平臺:全向移動底盤
2.主機平臺:PC級工控主板、8路無刷電機驅動器、大容量鋰電池、激光雷達接口、輪接口、二維碼慣性導航接口、雙目視覺接口以及機械臂接口;
3.麥克納姆輪組件:麥克納姆輪、無刷電機;
4.傳感器:激光雷達(標配)、攝像頭(標配)、雙目攝像頭(選配)。
四、性能系數:
1.移動底盤參數:
尺寸:700x500x300mm;自重:60kg;載重:100kg;續航:4小時;續航:約15km;車速:1m/s;*高轉向速度:100°/s;工作電壓:24V;電量:25Ah待機時間;充電時長:12小時;
2.主機性能參數:
Intel® Celeron™ N3150(1.6GHz)四核CPU;4G DDR3 1600MHz內存;120G硬盤;USB3.0 x2、USB2.0 x2、VGA顯示接口 x1、DVI-D顯示接口 x1、音頻接口 x3(輸入,輸出,麥克風)、COM接口 x2、RJ-45網絡接口 x2。
3.定位導航:二維碼慣性導航;
4.安全防護:機械防撞條、超聲測距、激光雷達;
五、課程設置:
| 主題 | 實驗內容 |
| ROS基礎學習 |
1. ROS機器人操作系統簡介 2. ROS系統基本結構 3. 建立第一個ROS系統軟件包 4. ROS話題(topic)機制 5. ROS服務(service)機制 6. 建立機器人模型 |
| ROS中的機器人導航實驗一 |
1. 機器人導航的基本概念 2. 地圖構建 3. 定位 4. 路徑規劃1——全局路徑規劃 5. 路徑規劃2——局部路徑規劃 6. 建立一個導航工程 |
| ROS中的機器人視覺實驗 |
1. 追蹤小球 2. 循線 3. 平面及物體識別 4. 面部檢測與追蹤 5. 面部識別 |
| ROS中的機器人導航操作實驗二 |
1. 二維碼慣性導航 2. |
基于ROS操作系統、ROS系統使用基礎、ROS中機器人導航基礎內容(需要雷達)、ROS中操作機械臂基礎內容、ROS中視覺基礎內容(需要攝像頭/雙目攝像頭)、基于ROS的應用級機器人開發。